Este proyecto está siendo realizado por Juan José Hernández Muñoz y José Abelardo Blas Bolaños.
Primeramente os dejamos este enlace para que veáis otra entrada hecha por un compañero de otro año en la que explica perfectamente el funcionamiento del robot NXT y los distintos sensores que tiene.
https://blog.iesvjp.com/programacion-robot-mindstorm-nxt/
En esta entrada os vamos a hacer una pequeña presentación del modelo de robot NXT que hemos construido y que ahora estamos programando. Es un modelo sencillo y fácil de construir siguiendo las instrucciones de su página web:
http://nxtprograms.com/index1.html
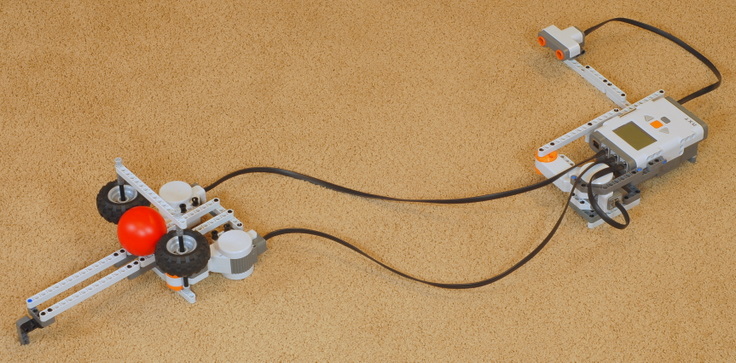
Nuestro modelo es un lanzador-bateador de béisbol. Trabaja con los tres servomotores; dos son para lanzar la pelota y una más que es el que contiene el brazo que golpea a la pelota.
Como sensores tenemos instalado el sensor de ultrasonidos, que es el que detecta la pelota cuando se acerca y activa el motor que la golpea.
Aquí os dejamos una imagen del modelo del robot y en breve haremos otra entrada con el código fuente y algún detalle más.